
¿Quieres saber más sobre la geometría de un coche RC?
Existen configuraciones de los coches RC que influyen ya sean en el agarre, estabilidad, velocidad, caída de giro, entrada y salida de curva,…Por ello hablaremos de la geometría de un coche RC: caídas, divergencias, convergencias, avances y antihundimiento.
Caída de un coche RC
La caída de un coche RC es la inclinación vertical de las ruedas respecto al suelo. Cuando la parte superior de las ruedas queda más cercana al chasis, tendremos caída negativa.
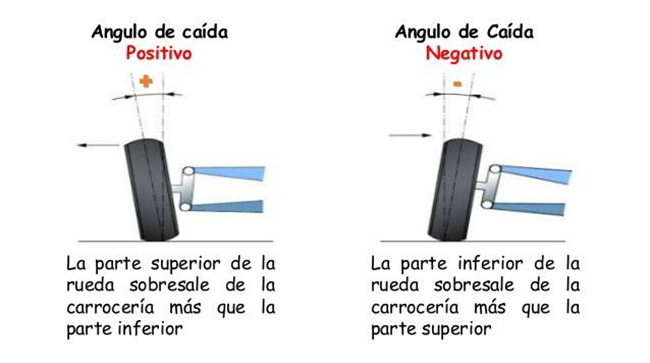
¿Qué es la caída negativa?
La caída negativa es necesaria pues cuando el coche entra en curva, el balanceo hace que las ruedas tengan caída positiva. Por eso, lo compensaremos dando caída negativa para que el contacto de la rueda sea el máximo posible.
Cuanto más caída negativa tengamos, mayor agarre del coche tendremos. Esto propiciará derrapes en curvas rápidas.
Si reducimos la caída negativa, conseguiremos un mejor deslizamiento progresivo, que será debido al menor agarre de ese tren.
La caída negativa nos aporta:
- Delante: Más entrada en la curva
- Detrás: Evita trompos a la salida de la curva
Convergencia y Divergencia de las ruedas
Para saber más sobre la convergencia y divergencia te animamos a leer nuestro anterior artículo:
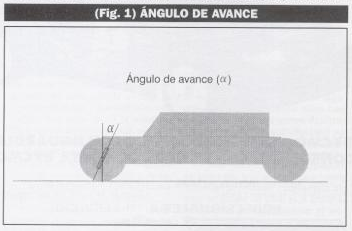
Avance coches RC
El avance es la inclinación del eje de la rueda con respecto a una línea vertical imaginaria. Si se inclina el eje hacia la parte posterior del vehículo se aumentará el avance y si lo disminuimos se inclina hacia adelante.
Si tenemos menos avance, tendremos una dirección más rápida (coche sobrevirador). Más avance convierte el coche en subvirador, pues la dirección es más lenta y más controlable.
¿Subviraje vs sobreviraje?
- El subviraje se produce cuando el vehículo pierde agarre en el tren delantero y da una sensación de ‘abrirse’ en las curvas.
- El sobreviraje es la perdida de agarre en el tren trasero en una curva, provocando que el vehículo realice un trompo. Cuando el culo del coche intenta ir por delante del morro es sobreviraje.

Antihundimiento
El antihundimiento es la inclinación del pasador del trapecio trasero con respecto al chasis. Esto hace que la suspensión trasera se vuelva más dura, pero sólo durante la aceleración, pues mantiene los trapecios traseros elevados para transmitir más fuerza al terreno (en lugar de ser absorbida por el movimiento de la suspensión). A mayor grado de antihundimiento, mayor tracción pero mayor inestabilidad en curvas muy rápidas.
Con el pasador totalmente paralelo al chasis, la dirección se vuelve muy brusca. Si aumentas el antihundimiento, la dirección se hará más fácil. En pistas deslizante se recomienda aumentar el grado de antihundimiento, mientras que en circuitos con mucho agarre, se recomienda menos antihundimiento.
El paso por baches también influye. Si los baches están en una zona de deceleración o frenada, se absorben mejor, mientras que si pasas acelerando por los baches, las suspensión se endurecerá y el coche botará más. En circuitos con muchos baches debemos aumentar el antihundimiento.
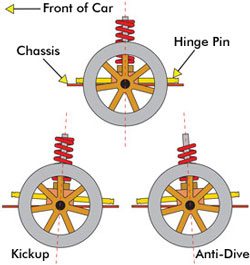
Kickup o caster (antihundimiento adelante)
El Kickup es el ángulo formado en el chasis para conseguir que los buggies aterricen los saltos sin clavarse. Sería como compararlo con la parte delantera de un trineo. Cuanto más alta esté esta parte, más fácil será para el trineo subir por saltos y terrenos elevados.
Por lo tanto, podemos decir que podemos hacer un buggy más manejable en circuitos duros y con baches, pero si es demasiado puede hacer que la suspensión delantera sea demasiado blanda para grandes saltos. El kickup también ayuda a controlar la altitud del chasis al acelerar. Al frenar, contra mayor sea el ángulo, menos se hundirá el morro en frenadas fuertes.
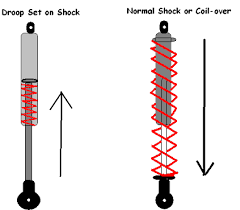
Droop
El droop es lo que el chasis sube antes de que las ruedas se despeguen del suelo desde una posición de reposo.
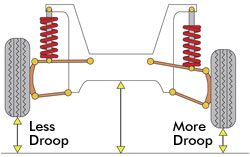
Si quitamos recorrido de los trapecios traseros conseguiremos que el coche se comporta de un modo menos saltarín y más estable, pues se levantará menos en los baches. El coche tenderá a derrapar de culo cuando frenemos, pues las ruedas se despegarán muy pronto del suelo produciendo el balanceo de pesos de atrás a adelante. Si por el contrario, dejamos más recorrido de los trapecios traseros, el coche adquirirá una inercia debido al movimiento ascendente y descendente del chasis en los baches. Esto hará tope en el chasis, y el impulso recibido es tan fuerte que el coche bota.
En la parte delantera, si dejamos poco droop, las ruedas se pueden levantar debido a la fuerza del motor, y por ello podemos perder la dirección fácilmente. Por esta razón, se suele dejar más droop delante para que las ruedas directrices permanezcan el máximo tiempo posible en contacto con el suelo.
Ackerman
Con el ackerman podemos variar la inclinación de los tirantes de la dirección. Si alargamos los tirantes de la dirección, llegaría un momento que se cortarían en un punto del chasis del vehículo.
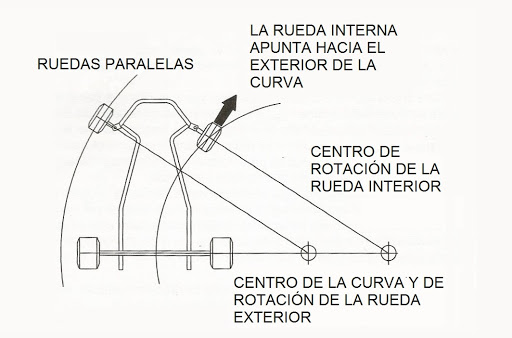
Si este punto está más avanzado, mayor será el giro del vehículo y mejor la entrada en curva.
Esperamos que la geometría de los coches radiocontrol te haya quedado clara. Por último, recordar que si tienes cualquier pregunta sobre el tema puedes contactar con nuestro equipo de servicio técnico de tu tienda RC Hobbyteam.